

Getting into the configuration phase of building Cerberus, my Y6 multicopter.
In a previous blog (linked here), I discussed some of the safety issues and considerations involved in getting into drone photography. In this blog, I’ll go over some of the parts that make up the drone and what they do.
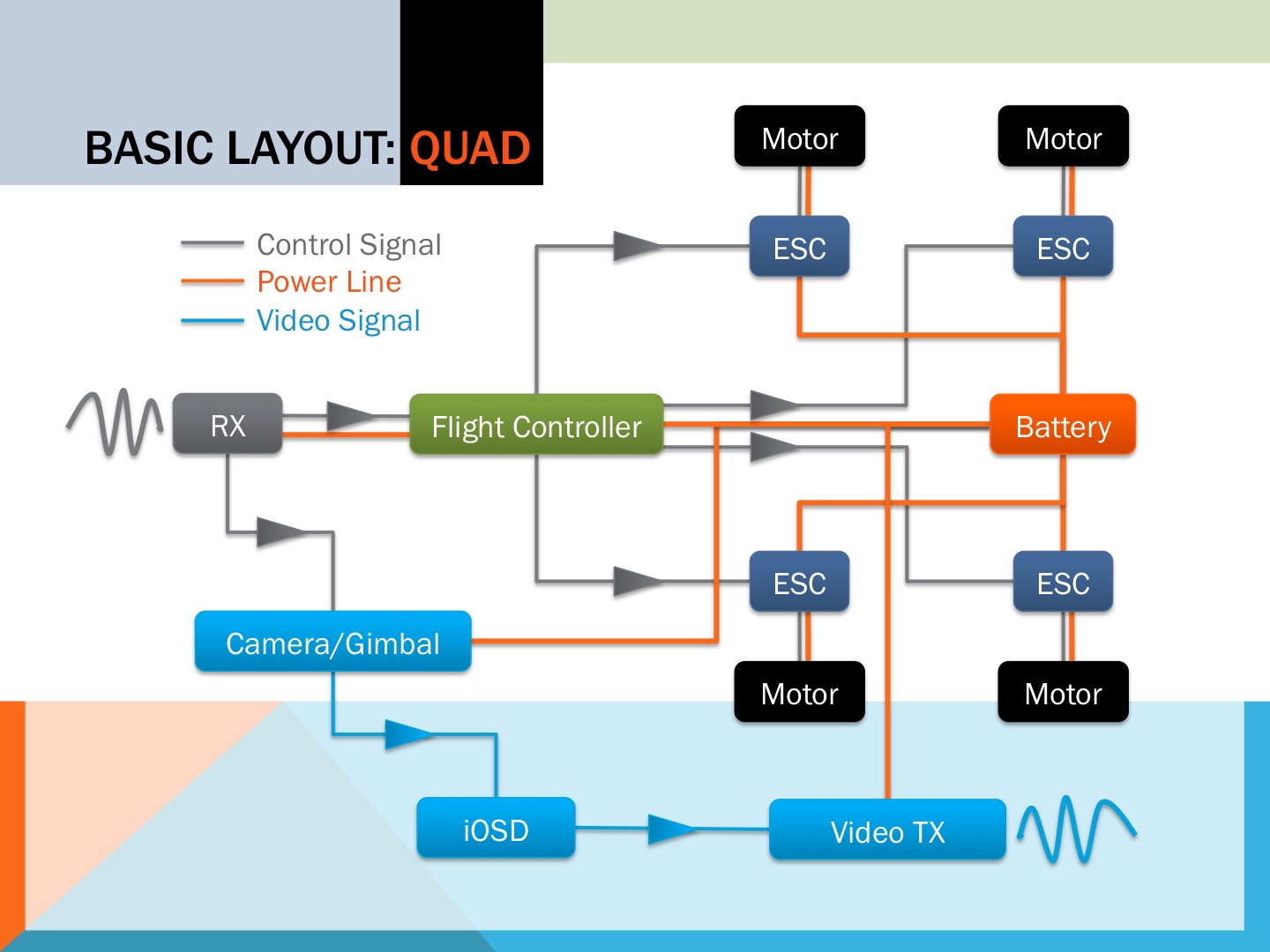
Basic Wiring Diagram of a Quadcopter
Battery
It may seem pretty straight forward, but you can’t have an electric multicopter without a battery. Frankly, batteries are the reason multicopters are as prevalent as they are. They’re usually listed something like 4S 6,000mAh. The 4S means it has four cells. A 3S battery has three cells, and a 6S battery has six cells. The 6,000mAh refers to the amount of energy stored in each of those cells. It’s important to note that the mAh is per cell, not the total power, so a 4S 4,000mAh battery actually stores more than a 3S 5,000mAh battery, and can discharge it faster at a level of about 15-16 volts rather than 11-12 volts. Most multicopter parts are compatible with 3S-6S batteries, so as long as you stay within that range, it’s just a question of how much power you want and how much weight you’re willing to sacrifice.
There’s a great video on batteries at Flite Test.
Airframe
You need something to hold all the pieces of your multicopter together, and that’s your airframe. People don’t usually build their airframes from scratch these days, and you can find inexpensive ones from people like Fortis Airframes or DJI Global. The big thing here is to find one that meets your weight requirements and motor configuration. I used the Fortis Y6 Airframe for my last build.
Landing gear is also important, and not necessarily tied to the airframe you use. Just think about what type you want and what your budget and weight can afford. Sometimes you need retractable landing gear so they’re out of the way, or integrate the landing gear into the gimbal so they turn with the camera to stay out of the way. Regardless, just think about what you want and what will work best for you.
Transmitter/Receiver (TX/RX)
You might call this a remote control, but in the drone world, it’s a transmitter, or TX. There are several different companies who make these and most of them are programmable. The key thing here is to get a transmitter and receiver that work together. I use the FrSky Taranis that comes with a FrSky X8R receiver for about $200. It pretty much works straight out of the box. You just have to pair it. The receiver takes in all the information from the controls and relays it to the multicopter’s flight controller. One thing you’ll sometimes see is “telemetry data,” something the Taranis and X8R can do. This means that there is two-way communication between the RX and TX which can relay things like battery voltage, altitude, etc. Telemetry data can be more useful than integrated on-screen displays (iOSDs, covered later) because you can program your transmitter to alert you when values reach a certain threshold. For instance, I have the FrSky LiPo battery voltage sensor plugged into my X8R, sending the voltage levels of my LiPo battery to my transmitter. The Taranis is programmed to tell me the voltage every 15 seconds to give me an idea of how much flight time I have, and to make an alert sound when it drops below 3.7 volts per cell. While I get the same sort of data on my iOSD, this frees me up to pay closer attention to the positioning of the airframe and getting the shot rather than trying to read numbers.
Flight controller
Think of this as the brain of the multicopter. Information from the RX is fed into the flight controller and translated into signals to be sent to the motors. There are many different versions of these from simple Naze boards costing $30 all the way up to very sophisticated ones like the DJI A2 costing $1,300. Most of them contain sensors to help it make decisions on how to fly the aircraft using things like accelerometers, variometers, GPS units, etc. I use a middle-of-the-road type flight controller, the DJI Naza-M. Depending on where you buy it, it should come with the following parts:
- Flight controller – this is the main unit that houses the accelerometer and variometer, and makes decisions on how to keep the position and altitude locked-in.
- GPS unit (optional) – usually mounted on a mast, this allows the Naza-M to position itself with a high degree of precision, and be able to counteract wind and turbulence to stay in a static hover.
- PMU (power management unit) – this is a central hub to provide power and communication to the various parts of the Naza-M kit.
- BTU (bluetooth unit – optional) – this allows you to connect to your Naza-M with your phone for easy configuration and troubleshooting on the road.
Some of the biggest things to look for when trying to decide on a flight controller are what flight modes it has (the Naza-M has manual, altitude mode, and GPS mode), as well as what rotor configurations it allows for (tricopter, quadricopter, hexacopter, Y6, etc). The Naza-M can’t control a tricopter, probably due to the addition of a servo for controlling yaw. Another thing to look at is how well it handles malfunctions. When using a multicopter with six or more rotors, it’s possible for one to stop spinning and still be able to land safely.
ESCs (electronic speed controllers)
The signal from the flight controller isn’t fed directly into the motor. It needs a device to translate the control signal into an electric pulse to drive the motor at the desired speed. That device is an ESC. An ESC combines the control signal with power from the battery up to its rated amperage to power the motor and make it run at the correct speed. These are generally fairly cheap, about $20-30 each, but when you need one for every motor, it can add up quickly.
Brushless motors
There’s not a whole lot to be said about motors. They spin the propellers and make the whole thing fly. The big thing to look at is the KV number, which corresponds to the number of rotations per minute per volt. A KV980 will spin slower with more torque than a KV2300 motor. This also determines what type of propellers you need. That KV980 will need “slow fly” or SF propellers, whereas the KV2300 will probably perform best with electric or E propellers. Lower KV numbers will be more efficient and stable, but higher KV numbers will give you faster response for a more agile aircraft.
Propellers
As mentioned above, propellers are usually classified as SF or E propellers, depending on the rotation speed they’re meant for. They also have two measurements attached, such as 10×4.7 (the measurements of the propellers I use). The first number is the diameter of the resulting circle, basically the length of the propeller. The second number deals with the pitch of the propeller. A higher number will have a greater pitch and “bite” into the air more, gaining thrust but losing efficiency. The second number will generally be about half of the previous number.
Servos
Tricopters are the only type of multicopter that absolutely needs a servo to function. A servo is motorized turning mechanism that can move a piece of your multicopter. In the case of the tricopter, a servo is needed to tilt the aft motor left and right to get yaw motion (turning motion) of the tricopter. On other multicopters, servos can be used for a variety of things, especially for retractable landing gear. The biggest thing to look at with servos is making sure they’re rated for the weight you’re trying to move them with. Don’t just think about the physical weight of the object, but the pressure involved in moving it under flight conditions. You can somtimes reduce the strain on a servo by placing it in a different place, using leverage to reduce the necessary force needed to move the object.
Gimbals
Similar to servos, gimbals are capable of moving and turning things. The big difference though is that gimbals use control units and high-speed motors to counteract movement from the aircraft and hold something stable, usually a camera. This is achieved by using accelerometers, gyroscopes, and a perfectly balanced articulation mechanism. Gimbals are usually described by the number of axis they can turn on. A two-axis gimbal will correct for tilt and pitch, but not yaw. A three-axis gimbal will correct for all three, often making the gimbal capable of moving completely independent of the multicopter. In these cases, a separate control can tell the gimbal to move the camera in whatever direction you desire regardless of which way the multicopter is pointed. In these situations, it generally works best to have a second operator with a second TX operating just the gimbal and camera while the first person focuses completely on flying the multicopter.
iOSD (integrated on-screen display)
If you’re flying a camera on your multicopter, it’s usually a good idea to be able to see what the camera sees. One device that can help you is an iOSD. Basically, what it does is overlays telemetry data onto the video feed from the camera, displaying things like altitude, heading, battery voltage, and even a virtual horizon, right on your screen. In my case, the iOSD was bundled with the Naza-M flight controller, GPS, and BTU. It’s handy, but optional.
Video transmitter/receiver
Having an iOSD is great, but useless if you can’t get that video signal back to you. There’s an additional catch, you don’t want to use a video transmitter in the same frequency range as your control TX/RX. Since most control transmitters operate in the 2.4 GHz range, you want your video transmitter to be 5.8 GHz range (consequentially, this is also why using a camera’s WiFi signal doesn’t work because it’s in the 2.4 GHz range and will interfere with control). The video receiver and monitor can be attached to the control transmitter using a monitor tray, and powered with a small 2200 mAh 3S battery. You do have to do some soldering and wiring to make that work though, but it’s not that hard.

Most of the boxes and parts that found their way into my Y6 hexacopter “Cerberus.”
Pingback: “So kids, you want to be a drone pilot?” | Blue Sky Above and a Camera Kit